728x90
반응형
Hough변환으로 이미지에서 이런 특정 모양을 검출
특정 모양을 파라미터화하고 이미지에서 모양을 찾는 일반적인 프레임 워크
직선
이미지에 있는 선들의 기울기와 상수를 찾을려 한다.
이미지 속에 있는 두 점이 주어졌을 때, 직선의 방정식을 다음과 같이 표현
선의 기울기와 y축과 만나는 지점을 계산한다.

* 확률적 Hough 직선이라 불리는 Hough직선의 다른 변형이 있다.
기본적으로 같은 일을 하지만, 직선 파라미터를 계산할 때는 다른 접근법을 사용, 더 복잡한 수학이 필요하다.
from skimage.data import checkerboard
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = checkerboard()
rows, cols = img.shape
pts1 = np.float32([[25, 25], [175, 25], [25, 175], [175, 175]])
pts2 = np.float32([[25, 50], [150, 25], [75, 175], [175, 125]])
H = cv2.getPerspectiveTransform(pts1, pts2)
img = cv2.warpPerspective(img, H, (cols, rows))
edges = cv2.Canny(img, 100, 150, apertureSize=3)
lines = cv2.HoughLinesP(edges, 1, np.pi/180, 50, 50, 8)
plt.figure(figsize=(9, 7))
plt.subplot(1, 2, 1)
plt.imshow(img, cmap="gray")
plt.title("원본 이미지")
plt.axis("off")
plt.subplot(1, 2, 2)
plt.imshow(img, cmap="gray")
plt.axis("off")
for i in range(len(lines)):
for x1, y1, x2, y2 in lines[i]:
plt.plot([x1, x2], [y1, y2], c='r', lw=10, alpha=0.9)
plt.title("확률적 Hough 변환으로 추출한 직선")
plt.tight_layout()
plt.show()

* 추후 자율주행에서 도로 라인을 검출할때 사용됩니다.
Hough 원

| cv2.HoughCircles(image, method, dp, minDist[, circles[, param1[, param2[, minRadius[, maxRadius]]]]]) → circles |
Parameters:
|
import cv2
import numpy as np
img = cv2.imread('chapter02/circle_singapor.jpg',0)
img = cv2.medianBlur(img,5)
cimg = cv2.cvtColor(img,cv2.COLOR_GRAY2BGR)
circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 90,param1=80,param2=80,minRadius=0, maxRadius=0)
circles = np.uint16(np.around(circles))
for i in circles[0,:]:
cv2.circle(cimg,(i[0],i[1]),i[2],(0,255,0),2)
cv2.circle(cimg,(i[0],i[1]),2,(0,0,255),3)
cv2.imshow('img', cimg)
cv2.waitKey(0)
cv2.destroyAllWindows()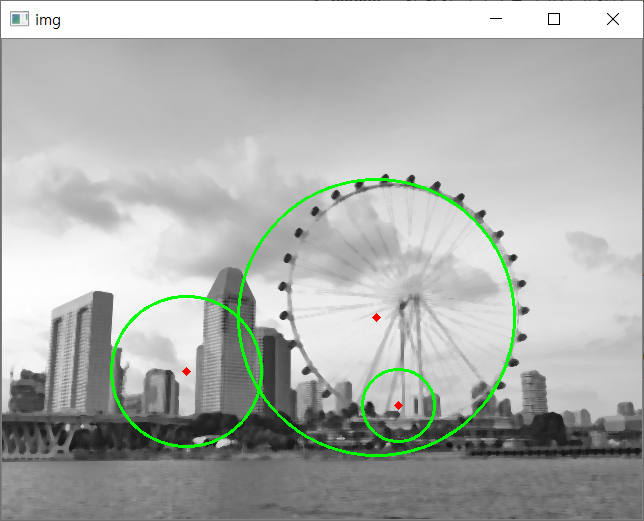
반응형
'Computer > OpenCV' 카테고리의 다른 글
| 두개의 이미지를 비교 (0) | 2019.12.25 |
|---|---|
| ValueError: Image is not numeric, but ndarray. (0) | 2019.12.16 |
| [Opencv] 이미지 필터_가우시안필터 (0) | 2019.12.16 |
| [OpenCV] 합성곱 (0) | 2019.12.14 |
| [Scikit-image] 색상 모듈, 그리기 모듈 (0) | 2019.12.13 |